제품
- 레이저 거리계 모듈
- 원자 램프
- 광섬유 자이로
- 중파장 적외선 카메라
- 레이저 자이로스코프
- WeChat/Whatsapp
- 레이저 거리 측정기 쌍안경
- கீழே உள்ள அட்டவணையானது வழக்கமான RFID பாதுகாப்பு நிலைகளின் ஒப்பீடு மற்றும் வெவ்வேறு வாலட் வடிவமைப்புகளுக்கான எதிர்பார்க்கப்படும் விளைவுகளை வழங்குகிறது. பாதுகாப்பான Wallet ஐத் தேர்ந்தெடுக்கும்போது வாடிக்கையாளர்கள் தகவலறிந்த முடிவுகளை எடுக்க இது உதவுகிறது.
- AESA 레이더
- 전자 나침반
- 레이저 방어
- 무선 영상 전송 링크





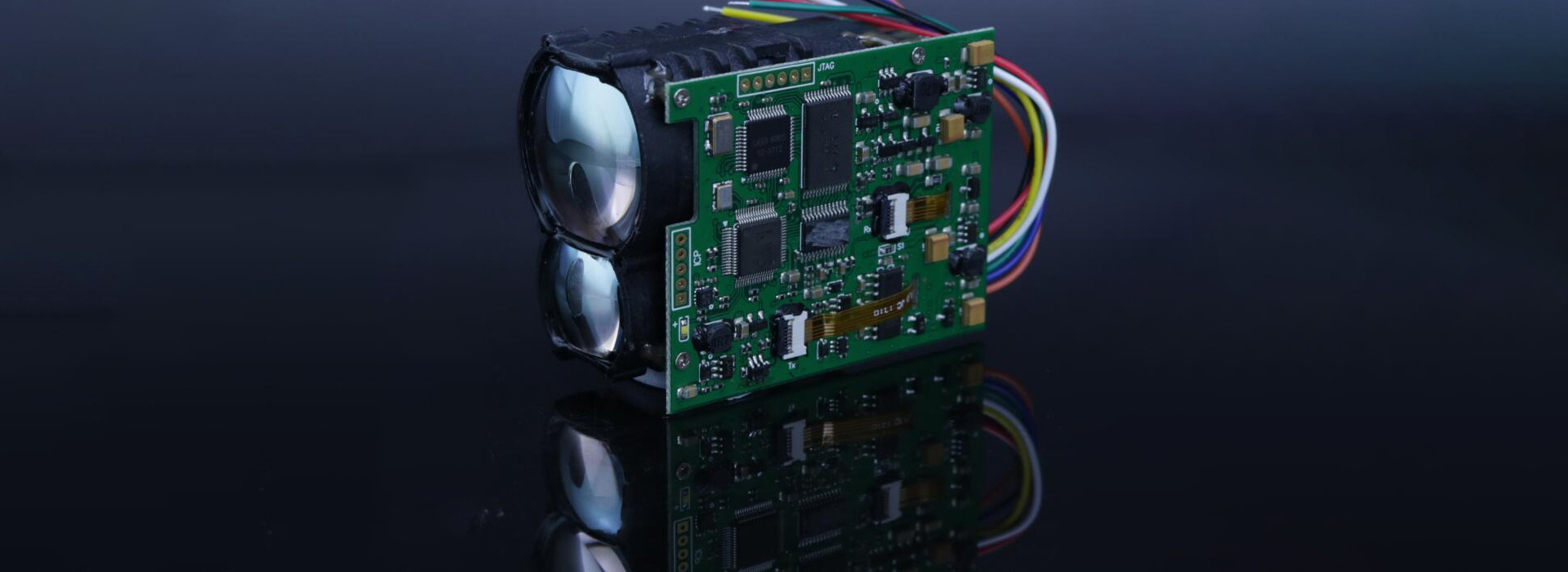
광섬유 자이로 스코프-에이전시계 및 GNSS 통합 내비게이션 시스템
광섬유 자이로 스코프-아카 계 및 GNSS 통합 내비게이션 시스템 JIO-D300은 다중 센서 퓨전 및 항해 솔루션 측정의 요구를 충족시키기위한 다중 센서 퓨전 및 항해 솔루션 알고리즘의 필요성을 충족시키기위한 다중 센서 퓨전 및 항해 솔루션 알고리즘 구현을 통해 비용 효율적인 폐쇄 루프 섬유 자이로 스코프, 가속도계 및 고급 GNS를 기반으로합니다. 태도, 제목 및 위치 정보.
모델:JIO-D300S
문의 보내기
제품 설명
광섬유 자이로 스코프-아세 레오 미터 및 GNSS 통합 내비게이션 시스템은 관성/위성 내비게이션 모드와 순수한 관성 모드가 결합되어 있습니다.
결합/위성 통합 내비게이션 모드 모드 위성 포지셔닝 정보에서 GNSS 수신기가 수신 할 수있는 위성; 신호 속도 태도를 잃은 후 출력 관성 솔루션 위치는 단기간에 미터 수준의 위치 정확도를 사용합니다.
순수한 관성 모드가 시작된 후에는 정확한 태도 측정 기능이 있으며 피치 롤링 및 제목을 출력 할 수 있으며, 순수한 관성은 정적으로 북쪽을 찾을 수 있습니다.
통합 유연성을 쉽게 제공하기 위해 광섬유 자이로 스코프의 Jioptics 설치 및 개발자 툴킷은 사양 요구 사항을 충족 할뿐만 아니라 최종 사용자의 수요를 충족시킬뿐만 아니라 빠른 프로토 타이핑에 대한 툴킷을 빠르게 프로토 타이핑합니다.
결합/위성 통합 내비게이션 모드 모드 위성 포지셔닝 정보에서 GNSS 수신기가 수신 할 수있는 위성; 신호 속도 태도를 잃은 후 출력 관성 솔루션 위치는 단기간에 미터 수준의 위치 정확도를 사용합니다.
순수한 관성 모드가 시작된 후에는 정확한 태도 측정 기능이 있으며 피치 롤링 및 제목을 출력 할 수 있으며, 순수한 관성은 정적으로 북쪽을 찾을 수 있습니다.
통합 유연성을 쉽게 제공하기 위해 광섬유 자이로 스코프의 Jioptics 설치 및 개발자 툴킷은 사양 요구 사항을 충족 할뿐만 아니라 최종 사용자의 수요를 충족시킬뿐만 아니라 빠른 프로토 타이핑에 대한 툴킷을 빠르게 프로토 타이핑합니다.
우리의 서비스
Jioptics는 전문적이고 효율적인 팀입니다. OEM/ODM 서비스 제공 귀하에게 문의하십시오. 독점 광섬유 광학 자이로 스코프를 사용자 정의하려면 당사에 문의하십시오.
제품 기능
- 위치 정확도까지 최대 센티미터 레벨
- 태도 측정 오류 0.01 °보다 나은 것입니다
- 작동 온도 범위 : -40 ~ 60 ℃
- 진동 환경 : 20 ~ 2000Hz, 3.03g
- 리치 인터페이스 유형, 지원 RS232, RS422, 캔 및 기타 표준 인터페이스
- 최대 30000h의 실패 사이의 평균 시간
- 태도 측정 오류 0.01 °보다 나은 것입니다
- 작동 온도 범위 : -40 ~ 60 ℃
- 진동 환경 : 20 ~ 2000Hz, 3.03g
- 리치 인터페이스 유형, 지원 RS232, RS422, 캔 및 기타 표준 인터페이스
- 최대 30000h의 실패 사이의 평균 시간
전기 특성
- 전원 공급 장치 : 넓은 전압 입력 12 ~ 36V
- 정격 전력 : 24W (최대)
- 정격 전력 : 24W (최대)
기계적 치수

기술 지표
| 매개 변수 | 속성 | 전형적인 가치 | 단위 |
| 위치 정확도 | 단일 포인트 (RMS) | 1.2 | m |
| rtk − (rms) | 2cm+1ppm |
|
|
| 후 처리 (RMS) | 1cm+1ppm |
|
|
| 잠금 정확도 손실 (CEP) | 2Nm① |
|
|
| 제목 (RMS) | 결합 된 정확도 | 0.1② | º |
| 후 처리 | 0.01 | º | |
| 잠금 보존 정확도 손실 | 0.02① | º | |
| 북쪽 추구 정확도 | 0.2③ | ºsecl | |
| 태도 (RMS) | 결합 된 정확도 | 0.01 | º |
| 후 처리 | 0.006 | º | |
| 잠금 보존 정확도 손실 | 0.02① | º | |
| 수평 속도 정확도 (RMS) |
|
0.05 | m/s |
| 타이밍 정확도 |
|
20 | ns |
| 데이터 출력 빈도 |
|
200 ④ | HZ |
| 자이로 | 범위 | 300 | º / s |
| 제로 바이어스 안정성 | 0.02⑤ | º/h | |
| 스케일 팩터 | 50 | ppm | |
| 코너 랜덤 워크 | 0.005 | º/√hr | |
| 가속도계 | 범위 | 16 | g |
|
|
제로 바이어스 안정성 | 50⑤ | μg |
| 스케일 팩터 | 50 | ppm | |
| 속도 랜덤 워크 | 0.01 | m/s/√hr |
속도 랜덤 워크
| 매개 변수 | 속성 | 참조 | 단위 |
| 물리적 크기 | 크기 | 176.8 × 188.8 × 117 | MM3 |
| 무게 | <5 | kg | |
| 전기 특성 | 정격 전압 | 12 ~ 36 | V |
| 평가 된 전력 | 24 (정상 상태) | W | |
| 메모리 | 예약된 |
|
|
| 환경 지표 | 작동 온도 | -40 ~+60 | ℃ |
| 저장 온도 | -45 ~+70 | ℃ | |
| 무작위 진동 | 3.03 (20 ~ 2000Hz) | g | |
| MTBF | 30000 | h | |
| 인터페이스 기능 |
|
PPS, 이벤트, RS232, RS422, CAN (선택 사항) |
|
|
|
네트워크 포트 (예약), 안테나 포트, 휠 속도 센서 포트 |
|
|
| 메모: ① 정렬이 유효하고 잠금은 60 분 동안 손실됩니다. 차량 조건은 조종해야합니다. 2 위치 정렬, 15 분 정렬, 두 위치의 차이는 90도보다 큽니다. ④ 단일 출력 200Hz; ⑤10s 평균. |
|||
핫 태그: 광섬유 자이로 스코프-에이커 미터 및 GNSS 통합 내비게이션 시스템, 제조업체, 공급 업체, 공장, 중국, 중국에서 제작, 맞춤형, 고품질