제품
- 레이저 거리계 모듈
- 원자 램프
- 광섬유 자이로
- 중파장 적외선 카메라
- 레이저 자이로스코프
- WeChat/Whatsapp
- 레이저 거리 측정기 쌍안경
- கீழே உள்ள அட்டவணையானது வழக்கமான RFID பாதுகாப்பு நிலைகளின் ஒப்பீடு மற்றும் வெவ்வேறு வாலட் வடிவமைப்புகளுக்கான எதிர்பார்க்கப்படும் விளைவுகளை வழங்குகிறது. பாதுகாப்பான Wallet ஐத் தேர்ந்தெடுக்கும்போது வாடிக்கையாளர்கள் தகவலறிந்த முடிவுகளை எடுக்க இது உதவுகிறது.
- AESA 레이더
- 전자 나침반
- 레이저 방어
- 무선 영상 전송 링크







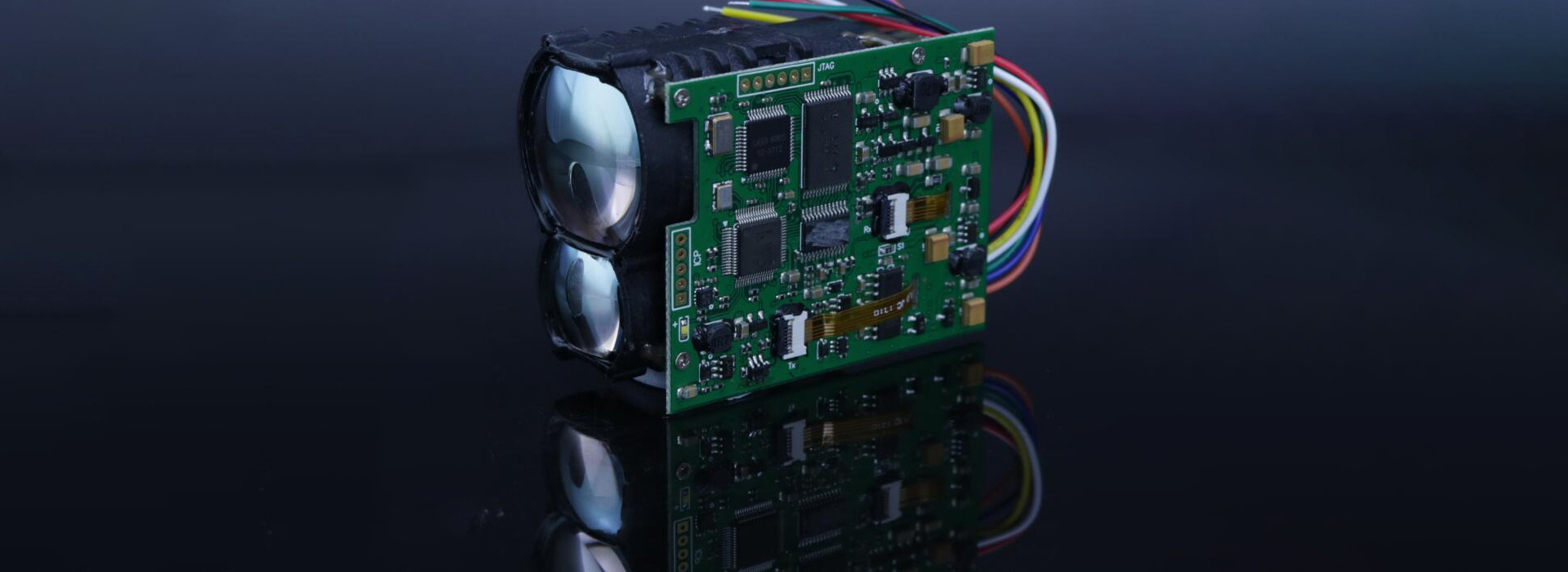
안티 드론 시스템용 2mrad 2km 레이저 거리 측정기 모듈
소형 STA-WR2000X 레이저 거리 측정기 모듈은 육군 및 해군의 대공 방어 시스템에 통합하는 데 매우 적합합니다. 거리 측정 모듈은 가용성이 높고 유지 관리 비용이 낮은 최첨단 다이오드 펌핑 에르븀 유리 레이저를 채택합니다. 2mrad 발산각은 0.1㎡의 단면적에서 최대 2000m까지 UAV를 측정할 수 있어 안티 드론 시스템의 중요한 구성 요소입니다.
문의 보내기
제품 설명
1) 단일 범위 및 연속 범위;
2) 레이저 거리 측정 명령에 응답하고 중지 명령에 따라 언제든지 거리 측정을 중지합니다.
3) 거리 측정 중 펄스당 한 번씩 거리 데이터 및 상태 정보를 출력합니다.
4) 전송된 레이저 펄스의 누적 수를 보고할 수 있습니다(전원 손실 없음).
5) 목표 표시 전후의 거리 선택;
6) 자체 테스트 기능.
2) 레이저 거리 측정 명령에 응답하고 중지 명령에 따라 언제든지 거리 측정을 중지합니다.
3) 거리 측정 중 펄스당 한 번씩 거리 데이터 및 상태 정보를 출력합니다.
4) 전송된 레이저 펄스의 누적 수를 보고할 수 있습니다(전원 손실 없음).
5) 목표 표시 전후의 거리 선택;
6) 자체 테스트 기능.
| 광학 지수 | |
| 파장 | 1535nm±5nm |
| 레이저 발산 각도 | 2mrad 이하 |
| 효과적인 수신 조리개 | 56mm |
| 범위 주파수 | 단일, 1~10Hz 조정 가능 |
| 범위 | 가시성 ≥ 12km, 표적 반사도 ≥ 0.3, 습도 ≤ 80%, UAV 거리 측정 거리(0.25m × 0.25m) ≥ 2km |
| 범위 정확도 | ≤±1m(RMS) |
| 정확도 측정 | ≥98% |
| 허위 경보율 | 1% 이하 |
| 최소 측정 범위 | 50m 이하 |
| 레이저 축 안정성 | ≤0.05mrad |
| 광축은 설치 기준과 평행합니다. | ≤0.3mrad |
| 기계적 표시기 | |
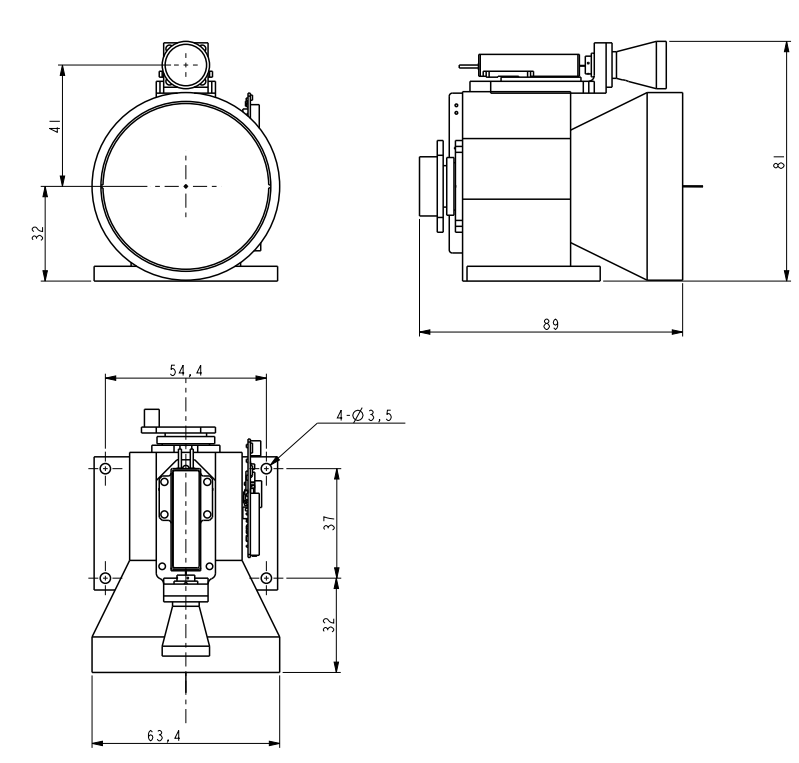
| 크기 | ≤90×63×82mm |
| 무게 | ≤300g |
| 전기 표시기 | |
| 전력공급 | DC9V~32V |
| 전력 손실 | 3W@10Hz 미만의 작업, 최대 전력 소비 5W 미만 |
| 인터페이스 | 단일, 1~10Hz 조정 가능 |
| Типичный акселерометр IEPE | 안전 거리에 도달하면 전원을 켜고 사용하십시오. 또는 저전력 모드에서 작동 상태를 제어합니다. |
| 회로 기판 보호 | 회로 기판의 설계 및 디버깅이 완료된 후 충격 방지 페인트를 코팅하고 "3가지 보호" 처리를 수행해야 합니다. |
| 환경 적합성 | |
| 작동 온도 | -40℃~65℃ |
| 보관온도 | -55℃-70℃ |
| 떨리다 | GJB150.16 A-2009 "군용 장비 실험실 환경 테스트 방법-진동 테스트" |
| 속눈썹 | GJB150.18 A-2009 "군용장비실험실 환경시험방법-영향시험" |
메모:
1. 범위 설명: 범위는 다양한 테스트 조건 및 테스트 대상에 따라 변경됩니다. 특수 대상을 감지한 경우 판매 측에 문의하여 확인하십시오.
2. 최소 범위: 30m-100m 변동, 정상적인 사용 후 50m를 권장합니다. 레이저 에너지가 크기 때문에 근거리에서 사용하면 감지기 칩이 탈 수 있으므로 디버깅할 때 감지기 칩이 타는 것을 방지하기 위해 좋은 거울 덮개를 가져오십시오.
1. 범위 설명: 범위는 다양한 테스트 조건 및 테스트 대상에 따라 변경됩니다. 특수 대상을 감지한 경우 판매 측에 문의하여 확인하십시오.
2. 최소 범위: 30m-100m 변동, 정상적인 사용 후 50m를 권장합니다. 레이저 에너지가 크기 때문에 근거리에서 사용하면 감지기 칩이 탈 수 있으므로 디버깅할 때 감지기 칩이 타는 것을 방지하기 위해 좋은 거울 덮개를 가져오십시오.
DATAH=XX(H)DATAL=YY(H)
외부 인터페이스
| 핀 | 정의 | 기능 | 메모 |
| 1 | RX+ | RS422 수신기 + | 파란색 |
| 2 | RX- | RS422 수신기 - | 녹색 |
| 3 | 텍사스- | 전기 표시기 | 보라 |
| 4 | 텍사스+ | RS422 전송 + | 노란색 |
| 5 | 접지 | 통신 접지선 | 하얀색 |
| 6 | VEE | 전원 + | 빨간색 |
| 7 | 접지 | 전원 공급 장치 - | 검은색 |
| 8 | PWR EN | / | 금연 건강 증진 협회 |
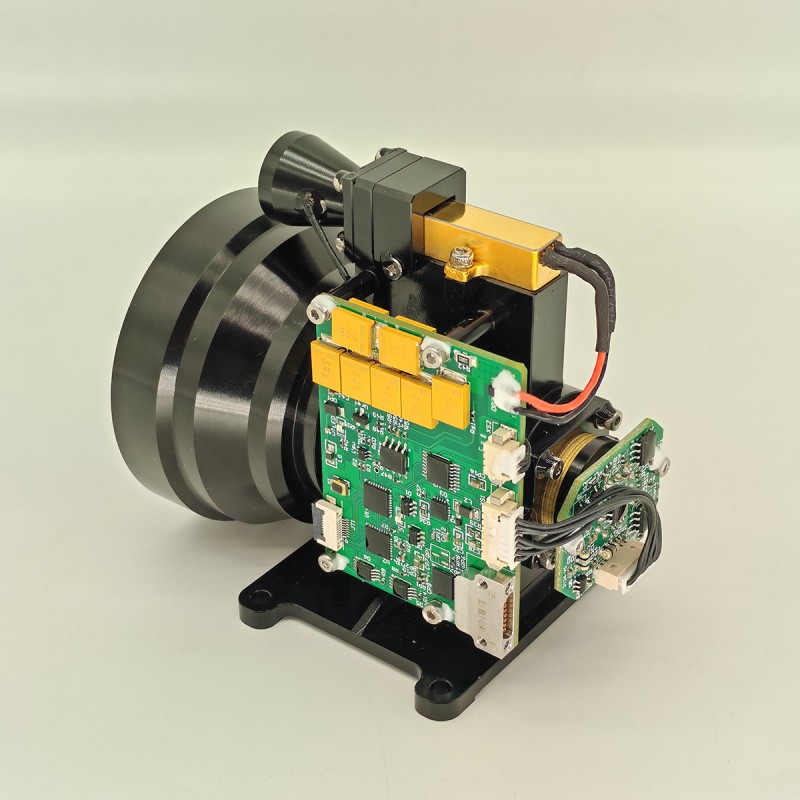
C-UAS(대항 무인 항공기 시스템)용 OEM/ODM 1-15km 레이저 거리 측정 모듈
통신 프로토콜
1. 전송 프로토콜: 비동기 직렬 통신;
2. 포트 속도: 115200;
3. 데이터 비트: 10비트: 시작 비트 1개, 데이터 비트 8개, 정지 비트 1개, 유효하지 않은 검증;
2) 레이저 거리 측정 명령에 응답하고 중지 명령에 따라 언제든지 거리 측정을 중지합니다.
5. 통신 모드: 마스터 컨트롤은 거리 측정 기계에 제어 명령을 보내고 거리 측정 기계는 명령을 수신하고 실행합니다. 레인징 상태에서는 레인징 기계가 레인징 주기에 따라 레인징 기계의 데이터와 상태를 상위 컴퓨터로 다시 보냅니다. 통신 형식과 명령 내용은 다음 표와 같습니다.
A) 메인 컨트롤 전송
2. 포트 속도: 115200;
3. 데이터 비트: 10비트: 시작 비트 1개, 데이터 비트 8개, 정지 비트 1개, 유효하지 않은 검증;
2) 레이저 거리 측정 명령에 응답하고 중지 명령에 따라 언제든지 거리 측정을 중지합니다.
5. 통신 모드: 마스터 컨트롤은 거리 측정 기계에 제어 명령을 보내고 거리 측정 기계는 명령을 수신하고 실행합니다. 레인징 상태에서는 레인징 기계가 레인징 주기에 따라 레인징 기계의 데이터와 상태를 상위 컴퓨터로 다시 보냅니다. 통신 형식과 명령 내용은 다음 표와 같습니다.
A) 메인 컨트롤 전송
보낼 메시지의 형식은 다음과 같습니다.
| STX0 | 명령 | 렌 | 데이터1H | 데이터1L | CHK |
표 2 전송된 메시지의 형식 설명
| A) 메인 컨트롤 전송 | 이름 | 설명하다 | 암호 | 비고 |
| 1 | STX0 | 메시지 시작 플래그 | A5(H) |
|
| 2 | 명령 | CW | 표 3 참조 |
|
| 3 | 렌 | DL | 시작 표시, 명령 단어 및 체크섬을 제외한 모든 바이트 수 |
|
| 4 | 데이터 | 매개변수 | 표 3 참조 |
|
| 5 | 도착 |
|
||
| 6 | CHK | XOR 검증 | 유효한 바이트를 제외하고 다른 모든 바이트는 XOR됩니다. |
|
명령은 다음과 같이 설명됩니다.
표 3 마스터가 거리 측정 기계로 보낸 명령 및 데이터 단어에 대한 설명
표 3 마스터가 거리 측정 기계로 보낸 명령 및 데이터 단어에 대한 설명
| A) 메인 컨트롤 전송 | CW | 기능 | 데이터 바이트 | 비고 | 길이 | 예제 코드 |
| 1 | 0x00 | 중지 | DATAH=00(H)DATAL=00(H) | 거리계가 측정을 중지합니다. | 6바이트 | A5 00 02 00 00 A7 |
| 2 | 0x01 | 단일 범위 | DATAH=00(H)DATAL=00(H) |
|
6바이트 | A5 01 02 00 00 A6 |
| 3 | 0x02 | 연속 범위 지정 | DATAH=XX(H)DATAL=YY(H) | DATA는 범위 기간을 ms 단위로 설명합니다. | 6바이트 | A5 02 02 03 E8 4E(1Hz 범위) |
| 4 | 0xA8 | 자가 점검 | DATAH=00(H)DATAL=00(H) |
|
6바이트 | A5 03 02 00 00 A4 |
| 5 | 0x04 | 선택 항목에 가장 가까운 거리를 설정합니다. | DATAH=XX(H)DATAL=YY(H) | DATA는 사각지대 값을 1m 단위로 설명합니다. | 6바이트 | A5 04 02 00 64 C7(가장 가까운 거리는 100m) |
| 6 | 0x06 | 조명 출력 쿼리의 누적 수 | DATAH=00(H)DATAL=00(H) | 조명 출력 쿼리의 누적 수 | 6바이트 | A5 06 02 00 00 A1 |
| 7 | 0x11 | APD 전원이 켜져 있습니다. | DATAH=00(H)DATAL=00(H) |
|
6바이트 | A5 11 02 00 00 B6 |
| 8 | 0x12 | APD 전원이 꺼져 있습니다. | DATAH=00(H)DATAL=00(H) |
|
6바이트 | A5 12 02 00 00 B5 |
| 9 | 0xEB | 숫자 쿼리 | DATAH=00(H)DATAL=00(H) | 숫자 쿼리 | 6바이트 | A5 EB 02 00 00 4C |
a) 주 제어가 형식을 수신합니다.
수신된 메시지의 형식은 다음과 같습니다.
수신된 메시지의 형식은 다음과 같습니다.
| STX0 | 명령 | 렌 | 데이터 | DATE0 | CHK |
표 4 수신된 메시지의 형식 설명
| A) 메인 컨트롤 전송 | 이름 | 설명하다 | 암호 | 비고 |
| 1 | STX0 | 메시지 시작 플래그 1 | A5(H) |
|
| 2 | CMD_JG | 데이터 명령어 | 표 5 참조 |
|
| 3 | 렌 | DL | 시작 표시, 명령 단어 및 체크섬을 제외한 모든 바이트 수 |
|
| 4 | DN | 매개변수 | 표 5 참조 |
|
| 5 | D0 |
|
||
| 6 | CHK | XOR 검증 | 유효한 바이트를 제외하고 다른 모든 바이트는 XOR됩니다. |
|
주요 제어 수신 상태 설명:
표 5는 거리 측정기가 마스터 컨트롤러로 전송한 데이터 워드를 설명합니다.
표 5는 거리 측정기가 마스터 컨트롤러로 전송한 데이터 워드를 설명합니다.
| A) 메인 컨트롤 전송 | CW | 기능 | 데이터 바이트 | 비고 | 전체 길이 |
| 1 | 0x00 | 중지 | D1=00(H) D0=00(H) |
|
6바이트 |
| 2 | 0xA8 | 자가 점검 | D8~D1 | D8-D7: -5V 전압, 단위 0.01V.D6-D5: 맹점 값, 단위 1mD4: APD 고전압 값, 단위 V;D3: 문자 유형, APD 온도 표시, 단위: 섭씨;D2-D1: +5V 전압, 단위 0.01V | 12바이트 |
| 3 | 0x04 | 가장 가까운 접근 설정까지의 거리, 단위 m | D1 D0 | 데이터는 가장 가까운 거리 값(1m 단위)을 설명합니다. 높게 시작하고 낮게 끝납니다. | 6바이트 |
| 4 | 0x06 | 조명 출력 쿼리의 누적 수 | D3~D0 | 3W@10Hz 미만의 작업, 최대 전력 소비 5W 미만 | 7바이트 |
| 5 | 0x11 | APD 전원이 켜져 있습니다. | D1=00(H) D0=00(H) | APD 전원이 켜져 있습니다. | 6바이트 |
| 6 | 0x12 | APD 전원 끄기 | D1=00(H) D0=00(H) | APD 전원이 꺼져 있습니다. | 6바이트 |
| 7 | 0xED | 초과 근무 | 0x00 0x00 | 레이저는 레이저 작업 보호를 받고 있으므로 측정할 수 없습니다. | 6바이트 |
| 8 | 0xEE | 유효성 오류 | 0x00 0x00 |
|
6바이트 |
| 9 | 0XEF | 직렬 포트 통신 시간 초과 | 0x00 0x00 |
|
6바이트 |
| 10 | 0x01 | 단일 범위 측정(단일 대상, 두 번째 및 세 번째 대상의 경우 0, 대상의 시작과 끝에서 세 번째 대상의 경우 0) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 첫 번째 목표 거리(0.1m 단위)D5-D3 두 번째 목표까지의 거리(0.1m 단위)D2-D0 세 번째 목표 거리(0.1m 단위)3. 목표는 가까운 곳에서 먼 곳까지입니다.D9(bit7-bit0) 플래그 바이트:D9는 주 파동을 나타내는 7번째 위치입니다. 1: 메인 웨이브 있음, 0: 메인 웨이브 없음. D9는 에코를 나타내는 6번째 위치입니다. 1: 에코 있음, 0: 에코 없음D9 다섯 번째 위치는 레이저 상태를 나타냅니다. 1: 일반 레이저, 0: 레이저 오류D9는 시간 초과 플래그의 네 번째 비트입니다. 1: 정상, 0: 시간 초과D9는 세 번째 위치(1로 설정)에서 유효하지 않습니다. D9 두 번째 위치는 APD 상태를 나타냅니다. 1: 정상, 0: errorD9는 이전 대상이 있는지 여부를 나타내는 첫 번째 위치입니다. 1: 이전 타겟이 있음, 0: 이전 타겟이 없음(사각지대에 있는 타겟).D9 0번째 비트는 다음 타겟이 있는지 여부를 나타냅니다. 1: 후속 대상 있음, 0: 후속 대상 없음(주 대상 다음 대상이 후속 대상임) | 14바이트 |
| 11 | 0x02 | 연속 범위 지정(단일 대상, 두 번째 및 세 번째 대상의 경우 0, 대상의 시작과 끝에서 세 번째 대상의 경우 0) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 첫 번째 목표 거리(0.1m 단위)D5-D3 두 번째 목표까지의 거리(0.1m 단위)D2-D0 세 번째 목표 거리(0.1m 단위)3. 목표는 가까운 것부터 먼 것까지입니다.D9(bit7-bit0) 플래그 바이트:D9는 메인 웨이브를 나타내는 7번째 비트입니다. 1: 메인 웨이브 있음, 0: 메인 웨이브 없음. D9는 에코를 나타내는 6번째 위치입니다. 1: 에코 있음, 0: 에코 없음D9 다섯 번째 위치는 레이저 상태를 나타냅니다. 1: 일반 레이저, 0: 레이저 결함D9는 시간 초과 플래그의 네 번째 비트입니다. 1: 정상, 0: 시간 초과D9는 세 번째 위치(1로 설정)에서 유효하지 않습니다. D9 두 번째 위치는 APD 상태를 나타냅니다. 1: 정상, 0: errorD9는 이전 대상이 있는지 여부를 나타내는 첫 번째 위치입니다. 1: 이전 타겟이 있음, 0: 이전 타겟이 없음(사각지대에 있는 타겟).D9 0번째 비트는 다음 타겟이 있는지 여부를 나타냅니다. 1: 후속 대상 있음, 0: 후속 대상 없음(주 대상 다음 대상이 후속 대상임) | 14바이트 |
| 12 | 0xEB | 숫자 쿼리 | D17… D0 | 단일 범위 측정(단일 대상, 두 번째 및 세 번째 대상의 경우 0, 대상의 시작과 끝에서 세 번째 대상의 경우 0) | 22바이트 |
| 참고: ① 정의되지 않은 데이터 바이트/비트, 기본값은 0입니다. | |||||
핫 태그: 안티 드론 ststem 용 2mrad 2km 레이저 거리 측정기 모듈, 제조업체, 공급 업체, 공장, 중국, 중국산, 맞춤형, 고품질
관련 카테고리
905nm 레이저 거리 측정기 모듈
1535nm 레이저 거리 측정기 모듈
1570nm 레이저 거리 측정기 모듈
1.54UM 레이저 범위 파인더 모듈
1064nm 레이저 대상 지정자
무인 항공기 STSTEM 모듈
범위 LiDAR 모듈
문의 보내기
문의사항은 아래 양식으로 부담없이 보내주세요. 24시간 이내에 회신해 드리겠습니다.