제품
- 레이저 거리계 모듈
- 원자 램프
- 광섬유 자이로
- 중파장 적외선 카메라
- 레이저 자이로스코프
- WeChat/Whatsapp
- 레이저 거리 측정기 쌍안경
- கீழே உள்ள அட்டவணையானது வழக்கமான RFID பாதுகாப்பு நிலைகளின் ஒப்பீடு மற்றும் வெவ்வேறு வாலட் வடிவமைப்புகளுக்கான எதிர்பார்க்கப்படும் விளைவுகளை வழங்குகிறது. பாதுகாப்பான Wallet ஐத் தேர்ந்தெடுக்கும்போது வாடிக்கையாளர்கள் தகவலறிந்த முடிவுகளை எடுக்க இது உதவுகிறது.
- AESA 레이더
- 전자 나침반
- 레이저 방어
- 무선 영상 전송 링크




")

1200m 미니 레이저 레인지 파인더 모듈 (LRF)
STA-M 시리즈 미니어처 레이저 레인지 파인더 모듈은 열 이미징, 야간 시력 및 기타 핸드 헬드 모바일 장치 및 소형 UAV 포드 장비 통합에 적합한 저전력 소비, 작은 크기, 안정적인 성능 및 기타 특성으로 905nm 반도체 레이저 구성 요소를 채택합니다.
측정 범위 : 5-1200mer
나무 측정 ≥1000 미터
측정 정확도 ± 1m
중량 ≤14 ± 0.5g
문의 보내기
제품 설명
기술 매개 변수는 다음 표에 나와 있습니다
| 모델 | STA-M010X | |
| 레이저 파장 | 905nm | |
| 범위의 기능 | 건물 | 1200m |
| 나무 | 1000m | |
| 레이저 등급 | 클래스 1 눈 안전 | |
| 미니 범위 | 5m | |
| 해결 | ± 0.1m | |
| 작동 전류 | ≤90ma | |
| 대기 전류 | ≤20ma | |
| 전력 소비 | 대기 ≤0.09W | |
| 피크 ≤0.23W | ||
| 통신 인터페이스 | TTL | |
| 작동 온도 | · -20 ~ ~+55 ℃ | |
| 저장 온도 | · -30 ~ ~+60 ℃ | |
| 입력 전압 | 3-5V (권장 5V 전원 공급 장치) | |
| 빔 발산 각도 | 5 질병 | |
| 범위의 주파수 | 1-3Hz | |
| 힘 | ≤1 mW 인간의 눈에 안전합니다 | |
| 범위의 방법 | 맥박 | |
| 무게 | 14 ± 0.5g | |
| 크기 | φ23x47mm | |
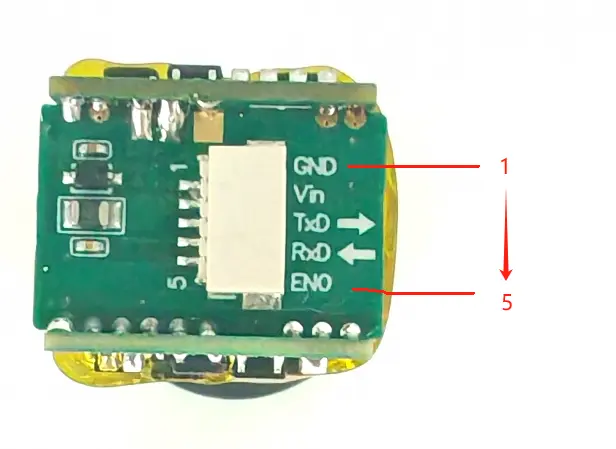
인터페이스와 핀은 다음 테이블과 같이 정의됩니다.
| TTL 인터페이스 | |||
| 핀 | 핀 정의 | 설명하다 | 도식 도면 |
| 1 | Gnd | 전원 공급 장치 - |
|
| 2 | 빈 | 전원 공급 장치 + | |
| 3 | TXD | 데이터를 전송합니다 | |
| 4 | RXD | 수신 데이터 | |
| 5 | 에노 | 핀을 활성화, 예약 | |
|
|
|
|
|
모듈 통신 명령 차트
| 마스터 명령 | ||
| 명령 코드 | 설명 | 방송 추가. 응답 |
| 0x80 | Rangefinder 상태를 읽으십시오 | 아니요 |
| 0x81 | 측정 결과를 읽으십시오 | 아니요 |
| 0x83 | 범위를 시작하십시오 | 아니요 |
| 0x84 | 범위를 중지하십시오 | 아니요 |
| 0x9e | 통신 매개 변수 프로그램 | 예 |
| 0xbe | 통신 매개 변수를 읽습니다 | 예 |
| 0xc0 | 커뮤니케이션 테스트 | 예 |
| 0xc1 | 펌웨어 버전을 읽으십시오 | 예 |
|
|
|
|
| 노예 응답 | ||
| 인식 코드 | 설명 | |
| 0x60 | 간단한 답변 프레임 | |
| 0x01 | 범위 데이터 프레임 | |
| 0x20 | 범위 파인더 상태 프레임 | |
| 0x21 | 통신 매개 변수 프레임 | |
| 0xe0 | 오류 메시지 프레임 | |
메모
1. 통신 프레임 형식 :
SlaveId + 명령 + 매개 변수 + 체크섬
2. 두 개의 인접한 프레임 사이의 간격은 최소한 1.5 바이트의 시간 여야합니다.
1ms 미만인 경우 1ms로 간주됩니다.
600bps : 25ms
1200bps : 12.5ms
2400bps : 6.25ms
4800bps : 3.125ms
9600bps : 1.56ms
19200bps : 1ms (0.78ms <1ms, 1ms 테이크)
3. 체크섬 계산 보내기;
이 모듈은 바이트 축적 합계에 의한 바이트의 검증 모드를 사용합니다.
검증, 마침내 체크섬 전송에 포함됩니다.
예를 들어 스캔 모드 명령의 점검 합계 "0x83 0x40":
A. 계정 축적 합계 : 0x83 + 0x40 = 0xc3;
B. 테이크 LSB [D7..D0] : 0xc3;
c.calculate 2의 보완 : 0x100 -0xc3 = 0x3d, 0x3d는 체크섬;
Mater가 보낼 때 슬레이브 주소 추가 : 0x10 0x83 0x40 0x3d
4. 검증 영수증;
수신 통신 프레임과 같은 : 0x10 0x83 0x40 0x3d,
슬레이브 주소 0x10
A. 계산 축적 합계 : 0x83 + 0x40 + 0x3d = 0x100;
B. 축적 LSB 테이크 합계 : 0x00; 0x00은 확인 결과입니다.
확인 결과가 0x00 인 경우 수신 된 데이터가 옳다는 것을 의미합니다. 확인 결과 인 경우
0x00이 아니므로 수신 된 데이터가 잘못되었음을 의미합니다.
모듈 명령 설명
참고 : 예에서, 각 명령의 슬레이브 주소는 0x10이며, 응용 프로그램에서는 슬레이브 주소가 프로그래밍 된 주소가됩니다.
1 0 커뮤니케이션 테스트 (0xc0) ;
| 마스터 보내기 | ||
| 명령 코드 | 매개 변수 | 설명 |
| 0xc0 | 없음 |
|
| 노예 응답 | ||
| 인식 코드 | 매개 변수 | 설명 |
| 0x60 | 없음 |
|
| 예 | ||
| 마스터 보내기 : 0x10 0xc0 0x40; 0x40은 체크섬입니다 슬레이브 응답 : 0x10 0x60 0xa0; 0xa0은 검사소입니다 |
||
2 r 명령 슬레이브 (0x83) ;
| 마스터 보내기 | ||
| 명령 코드 | 매개 변수 | 설명 |
| 0x83 | 바이트 1 | D7 : 예비 |
| D6 : 연속 범위 모드, 0 = OFF; 1 = on; | ||
| D5 : 안개 모드, 0 = OFF; 1 = on; | ||
| D4 : 데이터 단위, 0 = 미터; 1 = 마당; | ||
| D3 -D0 : 작업 모드, 0 = 범위; 1 = 속도; 2 = 작은 대상 모드; | ||
| 노예 응답 | ||
| 인식 코드 | 매개 변수 | 설명 |
| 0x60 | 없음 | 슬레이브가 자동 내보내기 모드로 설정된 경우, 슬레이브는 0x60을 처음으로 응답합니다. 시작 범위 명령을 수신 한 후 범위가 완료된 후에는 범위 결과가 발송됩니다. |
| 예 | ||
| 마스터 보내기 : 0x10 0x83 0x00 0x7d : 모드 0은 단일 측정 용이며, 데이터 단위는 미터입니다. 0x10 0x83 0x40 0x3d : Mode 0은 연속 장기를위한 것입니다. 데이터 단위는 미터입니다. 0x10 0x83 0x10 0x6d : 모드 0은 단일 측정 용이며, 데이터 단위는 야드입니다. 0x10 0x83 0x20 0x2d : Mode 0은 연속 머저리 용입니다. 데이터 단위는 야드입니다. 노예 응답 : 0x10 0x60 0xa0; |
||
메모:1 ex 모듈 데이터 내보내기 방법이 쿼리 모드로 설정된 경우 단일 측정 만 수행 할 수 있습니다.
2. 속도 모드에서 연속 범위 기능은 널이며 연속 속도 측정이 아닙니다.
3. FOG 모드는 FOG 모드 기능이있는 장치에만 유효합니다.
4.slave는 시작 범위 명령을 수신 한 후 0x60 응답 프레임을 보냅니다. 범위가 완료된 후 범위 결과를 보내기 시작합니다.
3 ang 명령 슬레이브 스톱 범위 (0x84) ;
| 마스터 보내기 | ||
| 명령 코드 | 매개 변수 | 설명 |
| 0x84 | 없음 |
|
참고 : 마스터가 연속 범위를 수행하기 위해 노예에게 명령을 보내면이 명령을 노예에게 보내어 범위를 중지해야합니다. 마스터가 한 번에 한 번에 노예에게 명령을 보내면이 명령을 보낼 필요가 없습니다.
4 0 노예 상태 읽기 (0x80) ;
| 마스터 보내기 | ||
| 명령 코드 | 매개 변수 | 설명 |
| 0x80 | 없음 |
|
| 노예 응답 | ||
| 인식 코드 | 매개 변수 | 설명 |
| 0x20 | 바이트 1 | D7 : 1 = 범위 파인더 바쁜; 0 = 범위 완성; D6 : 1 = Rangefinder 오작동; 0 = 오작동 없음; D5-D2 : 예비; D1 : 0 = 금지 된 각도 센서; 1 = 각도 센서 활성화; D0 : 0 = 각도 센서는 정상입니다. 1 = 비정상 각도 센서; |
| 바이트 2 | 예약하다 | |
5 result 레드 레드 파인더 결과 (0x81) ;
| 마스터 보내기 | |
| 설명 |
|
|
|
|
| 노예 응답 | |
| 설명 |
|
| D7 :: 거리 데이터, 0 = 데이터 유효; 1 = 잘못된 데이터; D6 :: 각도 데이터, 0 = 데이터 유효; 1 = 잘못된 데이터; D5 : 데이터 해상도, 0 = 0.5/LSB; 1 = 0.1/LSB; D4 : 데이터 단위, 0 = 미터; 1 = 마당; D3 -D0 : 작업 모드, 0 = 범위; 1 = 속도; |
|
| 거리가 유효 할 때 : 거리 [d15..d8]; 거리가 유효하지 않은 경우 : 0x80 = 범위는 결과가 없습니다. 0x81 = 시스템 오류; |
|
| 각도가 유효 할 때 : 거리 [d7..d0]; 각도가 유효하지 않은 경우 : 예약; |
|
|
|
|
| 예 | |
| 1 frame 슬레이브 전송 거리 프레임 : 0x10 0x01 0x60 0x12 0xd7 0xb6 거리 값 = 0x12d7 = 4823 = 482.3m 2 frame 슬레이브 전송 속도 프레임 : 0x10 0x01 0x21 0x03 0xd7 0x04 속도 값 = 0x03d7 = 983 = 98.3km/h 3 frame 슬레이브 전송 거리 프레임 : 0x10 0x01 0xe0 0x80 0x00 0x9f 거리 값은 유효하지 않습니다 (첫 번째 바이트는 0xe0, d7 = 1입니다). |
|
6 aud 슬레이브 커뮤니케이션 보드 속도 (0x9e), 공장 설정은 19200bps ;입니다.
| 마스터 보내기 | ||
| 명령 코드 | 매개 변수 | 설명 |
| 0x9e | 바이트 1 | 0x90이어야합니다 |
| 바이트 2 | 예약하다 | |
| 바이트 3 | 예약하다 | |
| 바이트 4 | 보드 속도 설정 : 0 = 1200bps; 1 = 2400bps; 2 = 4800bps; 3 = 9600bps; 4 = 19200bps (기본값); |
|
| 노예 응답 | ||
| 인식 코드 | 매개 변수 | 설명 |
| (읽기 슬레이브 매개 변수의 슬레이브 응답 부분을 참조하십시오) | ||
| 예 | ||
| 마스터가 프레임을 보내는 경우 : 0x10 0x9e 0x90 0x00 0x00 0x04 0xce; 그것은 수단입니다 : 노예의 보드 속도를 19200bps로 설정하십시오. | ||
참고 : 새로운 보드 속도는 모듈이 다시 시작된 후에 만 유효합니다.
7 0 슬레이브 주소 쓰기 (0x9e), 공장 설정 : 0x10 ;
| 마스터 보내기 | ||
| 명령 코드 | 매개 변수 | 설명 |
| 0x9e | 바이트 1 | 0x91이어야합니다 |
| 바이트 2 | 예약하다 | |
| 바이트 3 | 예약하다 | |
| 바이트 4 | 노예 새 주소; | |
| 노예 응답 | ||
| 인식 코드 | 매개 변수 | 설명 |
| (읽기 슬레이브 매개 변수의 슬레이브 응답 부분을 참조하십시오) | ||
| 예 | ||
| 슬레이브 주소를 0x20으로 작성하려면 마스터 보내기 : 0x10 0x9e 0x91 0x00 0x00 0x20 0xB1 | ||
메모:1. 장치가 다시 시작된 후 새 슬레이브 주소가 유효합니다.
2. 0x00은 브로드 캐스트 주소이므로 슬레이브 주소는 0x00으로 설정할 수 없습니다.
3. 기본 슬레이브 주소는 0x10입니다.
8 ex 쓰기 측정 결과 내보내기 방법 (0x9e) ;
| 마스터 보내기 | ||
| 명령 코드 | 매개 변수 | 설명 |
| 0x9e | 바이트 1 | 0x92 여야합니다 |
| 바이트 2 | 예약하다 | |
| 바이트 3 | 예약하다 | |
| 바이트 4 | 측정 된 결과 내보내기 메소드 SelectionG : 0 = 쿼리 모드 (슬레이브는 마스터가 읽기 명령을 보낼 때만 데이터를 내보낼 수 있음) 1 (기본값) = 자동 모드 (범위가 완료된 후 자동으로 데이터를 보냅니다); |
|
| 노예 응답 | ||
| 인식 코드 | 매개 변수 | 설명 |
| (읽기 슬레이브 매개 변수의 슬레이브 응답 부분을 참조하십시오) | ||
| 예 | ||
| 데이터 내보내기로 자동 내보내기로 변경하려면 마스터 보내기 : 0x10 0x9e 0x92 0x00 0x00 0x01 0xcf | ||
9 o UART IO 전압 (0x9E), 공장 설정 세트 : 3.3V ;
| 예 | ||
| 명령 코드 | 매개 변수 | 설명 |
| 0x9e | 바이트 1 | 0x93이어야합니다 |
| 바이트 2 | 예약하다 | |
| 바이트 3 | 예약하다 | |
| 바이트 4 | UART IO 전압 설정 : 72-19, 0.025V/LSB; | |
| 노예 응답 | ||
| 인식 코드 | 매개 변수 | 설명 |
| (읽기 슬레이브 매개 변수의 슬레이브 응답 부분을 참조하십시오) | ||
| 예 | ||
| UART IO 전압을 3.3V로 변경 한 다음 마스터 보내기 : 0x10 0x9e 0x93 0x00 0x00 0x84 0x4b | ||
참고 : VIO = 설정 * 0.025V, 기본 VIO = 3.3V
10 (읽기 커뮤니케이션 매개 변수 (0xBE) ;
| 마스터 보내기 | ||
| 명령 코드 | 매개 변수 | 설명 |
| 0xbe | 바이트 1 | 0x91 또는 0x92 여야합니다 |
| 노예 응답 | ||
| 인식 코드 | 매개 변수 | 설명 |
| 0x21 | 바이트 1 | 슬레이브 주소 : 0x01-0xff |
| 바이트 2 | D4 : 데이터 내보내기 방법; D3 -D0 : 전송 속도 설정; |
|
| 바이트 3 | UART IO 전압 설정 | |
11 information 노예가 잘못된 정보를 보냅니다. (0xe0) ;
| 노예 응답 | ||
| 인식 코드 | 매개 변수 |
|
| 0xe0 | 바이트 1 | D7 -D3 : 예비; D2 : 1 = 통신 매개 변수 오류; D1 : 1 = 인식 할 수없는 쉼표; D0 : 1 = 체크섬 오류; |
12 (펌웨어 버전 읽기 (이 명령은 v7.00 또는 최신 버전에서만 지원되었습니다;) ;
| 마스터 보내기 | ||
| 명령 코드 | 매개 변수 |
|
| 0xc1 | 없음 |
|
| 노예 응답 | ||
| 인식 코드 | 매개 변수 | 메모 |
| 0x61 | 바이트 0 | May 버전 (BCD) |
| 바이트 1 | 마이너 버전 (BCD) | |
| 예 | ||
| 슬레이브 응답 : 0x10 0x61 0x07 0x00 0x98 데이터 "0x07 0x00"은 펌웨어 버전이 v7.00임을 의미합니다. |
||
핫 태그: 1200m 미니 레이저 레인지 파인더 모듈 (LRF), 제조업체, 공급 업체, 공장, 중국, 중국에서 제작, 맞춤형, 고품질
관련 카테고리
905nm 레이저 거리 측정기 모듈
1535nm 레이저 거리 측정기 모듈
1570nm 레이저 거리 측정기 모듈
1.54UM 레이저 범위 파인더 모듈
1064nm 레이저 대상 지정자
무인 항공기 STSTEM 모듈
범위 LiDAR 모듈
문의 보내기
문의사항은 아래 양식으로 부담없이 보내주세요. 24시간 이내에 회신해 드리겠습니다.





")