제품
- 레이저 거리계 모듈
- 원자 램프
- 광섬유 자이로
- 중파장 적외선 카메라
- 레이저 자이로스코프
- WeChat/Whatsapp
- 레이저 거리 측정기 쌍안경
- கீழே உள்ள அட்டவணையானது வழக்கமான RFID பாதுகாப்பு நிலைகளின் ஒப்பீடு மற்றும் வெவ்வேறு வாலட் வடிவமைப்புகளுக்கான எதிர்பார்க்கப்படும் விளைவுகளை வழங்குகிறது. பாதுகாப்பான Wallet ஐத் தேர்ந்தெடுக்கும்போது வாடிக்கையாளர்கள் தகவலறிந்த முடிவுகளை எடுக்க இது உதவுகிறது.
- AESA 레이더
- 전자 나침반
- 레이저 방어
- 무선 영상 전송 링크








9km 범위 파인더 모듈
STA-D0912Y 9km 범위 파인더 모듈은 저전력 소비, 소형 구조, 높은 정밀도, 긴 측정 거리 및 인간 눈 안전의 특성을 갖는 Jioptics에 의해 독립적으로 개발 된 1535nm Erbium Glass 레이저 모듈을 채택합니다.
문의 보내기
제품 설명
최대 측정 범위 : 9000m (차량) 12000m (벽)
범위 정확도 ± 1m
측정 정확도 ≥ 98%
무게 ≤102g
범위 정확도 ± 1m
측정 정확도 ≥ 98%
무게 ≤102g
9km 범위 파인더 모듈 기능
1. 전체 구조의 통합 설계, 충격 저항, 진동 저항, 높은 신뢰성, 강한 환경 적응성;
2. 독특한 Erbium 유리 레이저 통합 구성 설계 및 엔드 페이스 다중 점 밀봉 설치, 높은 내구성, 긴 작업 생활, 눈 안전;
3. 회로의 내부 인터페이스는 모두 용접 와이어 직접 연결 프로세스를 채택합니다. 용접 와이어 직접 연결 프로세스는 단단하고 신뢰할 수 있으며 커넥터의 풀기, 산화 및 수증기로 인한 단락이나 접촉이 불량하고 제품의 신뢰성과 수명을 향상시킬 수 있습니다.
2. 독특한 Erbium 유리 레이저 통합 구성 설계 및 엔드 페이스 다중 점 밀봉 설치, 높은 내구성, 긴 작업 생활, 눈 안전;
3. 회로의 내부 인터페이스는 모두 용접 와이어 직접 연결 프로세스를 채택합니다. 용접 와이어 직접 연결 프로세스는 단단하고 신뢰할 수 있으며 커넥터의 풀기, 산화 및 수증기로 인한 단락이나 접촉이 불량하고 제품의 신뢰성과 수명을 향상시킬 수 있습니다.
제품 성능 지수
| 목 | 색인 | |
| 모델 | STA-D0912Y | |
| 작동 파장 | 1535nm ± 10nm | |
| 범위 범위 | 80m-12000m | |
| 범위의 기능 | 16000m | 일반적인 목표, 가시성 ≥ 25km |
| 12000m | 큰 대상, 가시성 ≥ 25km | |
| 9000m | 가시성 ≥ 25km, 2.3m × 4.6m 차량의 0.3 반사율을 가진 목표 | |
| 습기 | ≤ 80% | |
| 범위 정확도 | ± 1m | |
| 정확도 | ≥98% | |
| 범위 해상도 | ≤50m | |
| 분기 각도 | ≤0.5mrad | |
| 범위의 주파수 | 한 번, 1Hz, 5Hz | |
| 크기 | ≤66mm × 59mm × 42mm | |
| 전압 | 5V ~ 14V | |
| 작동 전력 소비 | 평균 전력 소비 : ≤ 3W | |
| 대기 전력 소비 | ≤0.01W | |
| 작업 온도 | -40 60+60 ℃ | |
| 저장 온도 | -55 7+70 ℃ | |
| 무게 | ≤102g | |
구조 설치 인터페이스


전기 인터페이스
상단 컴퓨터 끝은 10pin 커넥터를 통해 Rangefinder를 사용하여 가교 테스트를 실현합니다. Rangefinder 끝의 전원 공급 장치 및 통신 포트의 핀 정의는 다음 표에 표시되며 커넥터 연결 핀 1의 위치는 다음 그림에 표시됩니다.
Rangefinder End에서 전원 공급 장치 및 통신 포트의 핀 정의
| 핀 번호 | 숫자 | 전기 특성의 정의 | 메모 |
| P-1 | Vin+ | 입력 전력 양성 | 전원 공급 장치 |
| P-2 | com | 입력 전력의 음의 극 | |
| P-3 | power_ctl | 저전력 제어 포트 | 현탁 또는 높은 (3V ~ 9V) 효과 |
| P-4 | RS422_TXD+ | 신호 출력 포트 | 호스트 컴퓨터의 범위 inder |
| P-5 | RS422_TXD- | ||
| P-6 | RS422_TXD- | 신호 입력 포트 | 상단 컴퓨터 대 레인지 파인더 |
| P-7 | RS422_TXD+ | ||
| P-8 | Gnd | 통신 접지선 | 통신 접지선 |
| P-9 | TTL_RXD | 신호 입력 포트 | 3.3V TTL |
| P-10 | TTL_TXD | 신호 출력 포트 |
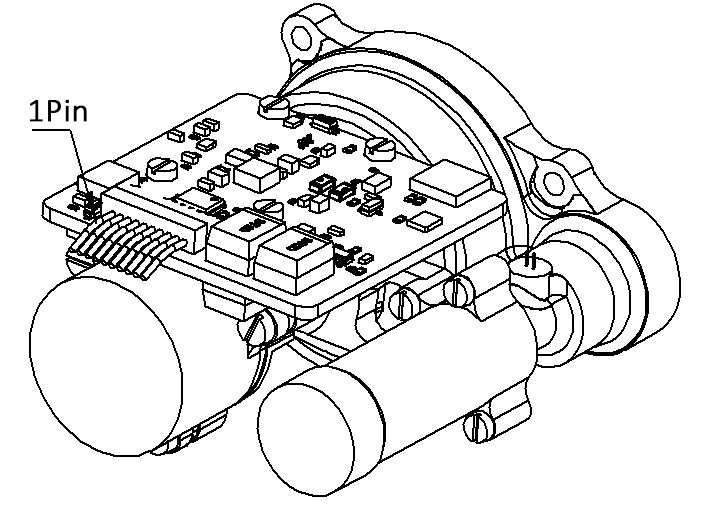
커넥터 연결 1 핀 위치
소프트웨어
데이터
데이터
Rangefinder와 상단 컴퓨터 간의 데이터 전송에는 다음 내용이 포함됩니다.
● 제어 명령 : 단일, 1Hz 범위의 명령어, 5Hz 범위의 명령어, 쿼리 명령 등 포함;
● 반환 데이터 : 거리 정보, 주변 온도, 범위 inder 상태 등을 포함하여.
Rangefinder와 상단 컴퓨터 간의 데이터 교환은 RS422/TTL (2- 선택 1)을 채택하며 그 특성은 다음과 같습니다.
● 전송 속도 : 38400 (공장)/9600/57600/115200;
● 바이트 구조 : 앞면의 낮은 순서, 뒷면의 높은 순서;
● 바이트 구성 : 1 비트 시작 비트, 8 비트 데이터 비트, 확인 없음, 1 비트 정지 비트.
● 제어 명령 : 단일, 1Hz 범위의 명령어, 5Hz 범위의 명령어, 쿼리 명령 등 포함;
● 반환 데이터 : 거리 정보, 주변 온도, 범위 inder 상태 등을 포함하여.
Rangefinder와 상단 컴퓨터 간의 데이터 교환은 RS422/TTL (2- 선택 1)을 채택하며 그 특성은 다음과 같습니다.
● 전송 속도 : 38400 (공장)/9600/57600/115200;
● 바이트 구조 : 앞면의 낮은 순서, 뒷면의 높은 순서;
● 바이트 구성 : 1 비트 시작 비트, 8 비트 데이터 비트, 확인 없음, 1 비트 정지 비트.
정보
제어 명령 정보의 형식은 다음 표에 나와 있습니다.
통제 명령 정보 범위 파인더가 수신 한 정보
| 바이트 | 설명 | 바이트 데이터 (명령 단어, 데이터, 체크 비트) | 메모 |
| 1 | 프레임 헤더 | 0x55 |
|
| 2-5 |
|
1 범위 : 0xf2 0x00 0x00 0xf2 | 피드백 데이터는 아래 표에 나와 있습니다 |
| 1Hz 범위 : 0xf3 0x01 0x00 0xf2 | |||
| 5Hz 범위 : 0xf3 0x02 0x00 0xf1 | |||
| 범위 중지 : 0xf3 0x00 0x00 0xf3 | |||
| 전송 속도 설정 : 0xf6 _ _0xxx | ____ Baud Rate/100 (16 진수 표현)을 설정합니다. 여기서 0xxx는 2-4 바이트의 XOR입니다. | ||
| 자체 점검 명령 : 0xf0 0x00 0x00 0xf0 | 피드백 데이터는 아래 표에 나와 있습니다 | ||
| 쿼리 명령 : 0xf8 0x00 0x00 0xf8 | |||
| 게이팅 값 설정 : 0xf4 ___ ___ 0xxx | ___ 세트 스트로브 값 (16 진수 표현)이고 0xxx는 독점 또는 2 ~ 4 바이트입니다. | ||
| 6 | 프레임 끝 | 0! |
|
Rangefinder의 반환 데이터는 일반 데이터 및 자체 테스트 데이터로 나뉩니다.
● 일반 데이터 : 대상 수, 측정 거리, 범위 계층 상태 등을 포함하여 아래 표를 참조하십시오.
● 쿼리 데이터 : 주변 온도, 레인지 파인더 상태 등을 포함하여 아래 표를 참조하십시오.
● 일반 데이터 : 대상 수, 측정 거리, 범위 계층 상태 등을 포함하여 아래 표를 참조하십시오.
● 쿼리 데이터 : 주변 온도, 레인지 파인더 상태 등을 포함하여 아래 표를 참조하십시오.
거리 측정 기계에 의해 반환 된 종래의 데이터
| 바이트 | 설명 | 바이트 값 (16 진수) |
| 1 | 헤더 | 0! |
| 2 | 목표 수 |
|
| 3 | 첫 번째 대상 거리 정보의 높은 바이트 |
|
| 4 | 첫 번째 대상 거리 정보의 낮은 바이트 |
|
| 5 | 첫 번째 대상 거리 정보 소수 숫자 | 소수점 후 두 십진 자리 |
| 6 | 최종 목표 거리 정보의 높은 바이트 |
|
| 7 | 최종 목표 거리 정보의 낮은 바이트 |
|
| 8 | 마지막 대상 거리 정보 소수 숫자 | 소수점 후 두 십진 자리 |
| 9 | 범위의 상태 바이트 | 상태 단어, 아래 표를 참조하십시오 |
| 10 ~ 13 | 광 출력 수 |
|
| 14 | 단어 확인 | 바이트 2-13 XOR |
| 15 | 프레임 끝 | 0x55 |
상태 단어의 의미
| 일련 번호 | 바이트 9 | 중요성 |
| 1 | 0xf2 | 1 범위 |
| 2 | 0xf3 | 1Hz 범위 |
| 3 | 0xf4 | 5Hz 범위 |
| 4 | 0xf5 | 범위를 중지하십시오 |
Query 데이터는 Rangefinder가 다시 전송합니다
| 바이트 | 설명 | 바이트 값 (16 진수) |
| 1 | 프레임 헤더 | 0xcc |
| 2 | 대기 | 대기 |
| 3 | 주변 온도 바이트 | 8 비트 서명 번호, 단위 : ℃ |
| 4 | 자체 테스트 정보 바이트 | 0x 00은 쿼리 기본값을 나타냅니다 0x 03은 자체 점검 빛이 정상임을 나타냅니다 0xff는 비정상적인 자기 감지 빛을 나타냅니다 |
| 5 | 고강도 작업 상태 바이트 | 1 : 일반 작동 모드 플래그 비트 0 : 고강도 작업 모드 플래그 비트 |
| 6 | 거리 스트로브 값 높은 바이트 | 16 진수 표현 |
| 7 | 거리 게이팅 값의 낮은 바이트 | |
| 8 | 보드 속도 높은 바이트 | 16 진수 표현, Baud 비율은 루프백 데이터 * 100입니다 |
| 9 | 보드 속도가 낮은 바이트 | |
| 10 | 빛의 수는 8 비트 높이입니다 | 16 진수 표현 |
| 11 | ||
| 12 | 낮은 8 비트의 광수 | |
| 13 | ||
| 14 | 단어 확인 | 바이트 2-13 XOR |
| 15 | 프레임 끝 | 0x55 |
보드 속도 설정
전송 속도 설정 작동 방법 :
a.send "0x 55 0xf6 0x 00 0x 60 0x 96 0xxx"레이저 범위 파인더에 대한 명령 i .e. 보드 속도를 9600bps로 설정하십시오. Rangefinder는 "CC 01 19 00 01 00 00 00 60 00 00 00 79 55", "0x 00 0x 60"을 반환합니다. 현재 보드 속도가 9600bps로 설정되었음을 나타냅니다.
B. "0x 55 0xf6 0x 0x 80 x 77 0xxx"레이저 범위 파인더에 대한 명령, i .e. 전송 속도를 38400bps로 설정하십시오. Rangefinder는 "CC 01 19 00 01 00 00 01 80 00 00 00 00 98 55"를 반환하고 "0x 01 0x 80"을 반환합니다.
c.send "0x 55 0xf6 0x 0x 40 0xb4 0xxx"레이저 레인지 파인더에 대한 명령, 즉 Baud 속도를 57600bps로 설정합니다. Rangefinder는 "CC 01 19 00 01 00 00 02 40 00 00 00 00 5B 55"및 "0x 02 0x 40"을 다시 보냅니다. 현재 Baud 속도가 57600bps로 설정되었음을 나타냅니다.
d.send "0x 55 0xf6 0x 0x 80 x 72 0xxx"레이저 범위 파인더에 대한 명령, i .e. 보드 속도를 115200bps로 설정하십시오. Rangefinder는 "CC 01 19 00 01 00 04 80 00 00 00 9d 55", "0x 04 0x 80"을 반환합니다. 현재 보드 속도가 115200bps로 설정되었음을 나타냅니다.
a.send "0x 55 0xf6 0x 00 0x 60 0x 96 0xxx"레이저 범위 파인더에 대한 명령 i .e. 보드 속도를 9600bps로 설정하십시오. Rangefinder는 "CC 01 19 00 01 00 00 00 60 00 00 00 79 55", "0x 00 0x 60"을 반환합니다. 현재 보드 속도가 9600bps로 설정되었음을 나타냅니다.
B. "0x 55 0xf6 0x 0x 80 x 77 0xxx"레이저 범위 파인더에 대한 명령, i .e. 전송 속도를 38400bps로 설정하십시오. Rangefinder는 "CC 01 19 00 01 00 00 01 80 00 00 00 00 98 55"를 반환하고 "0x 01 0x 80"을 반환합니다.
c.send "0x 55 0xf6 0x 0x 40 0xb4 0xxx"레이저 레인지 파인더에 대한 명령, 즉 Baud 속도를 57600bps로 설정합니다. Rangefinder는 "CC 01 19 00 01 00 00 02 40 00 00 00 00 5B 55"및 "0x 02 0x 40"을 다시 보냅니다. 현재 Baud 속도가 57600bps로 설정되었음을 나타냅니다.
d.send "0x 55 0xf6 0x 0x 80 x 72 0xxx"레이저 범위 파인더에 대한 명령, i .e. 보드 속도를 115200bps로 설정하십시오. Rangefinder는 "CC 01 19 00 01 00 04 80 00 00 00 9d 55", "0x 04 0x 80"을 반환합니다. 현재 보드 속도가 115200bps로 설정되었음을 나타냅니다.
핫 태그: 9km 범위의 파인더 모듈, 제조업체, 공급 업체, 공장, 중국, 중국에서 제작, 맞춤형, 고품질
관련 카테고리
905nm 레이저 거리 측정기 모듈
1535nm 레이저 거리 측정기 모듈
1570nm 레이저 거리 측정기 모듈
1.54UM 레이저 범위 파인더 모듈
1064nm 레이저 대상 지정자
무인 항공기 STSTEM 모듈
범위 LiDAR 모듈
문의 보내기
문의사항은 아래 양식으로 부담없이 보내주세요. 24시간 이내에 회신해 드리겠습니다.